
Sentinel-2 global cloudless mosaic
Good news everyone:
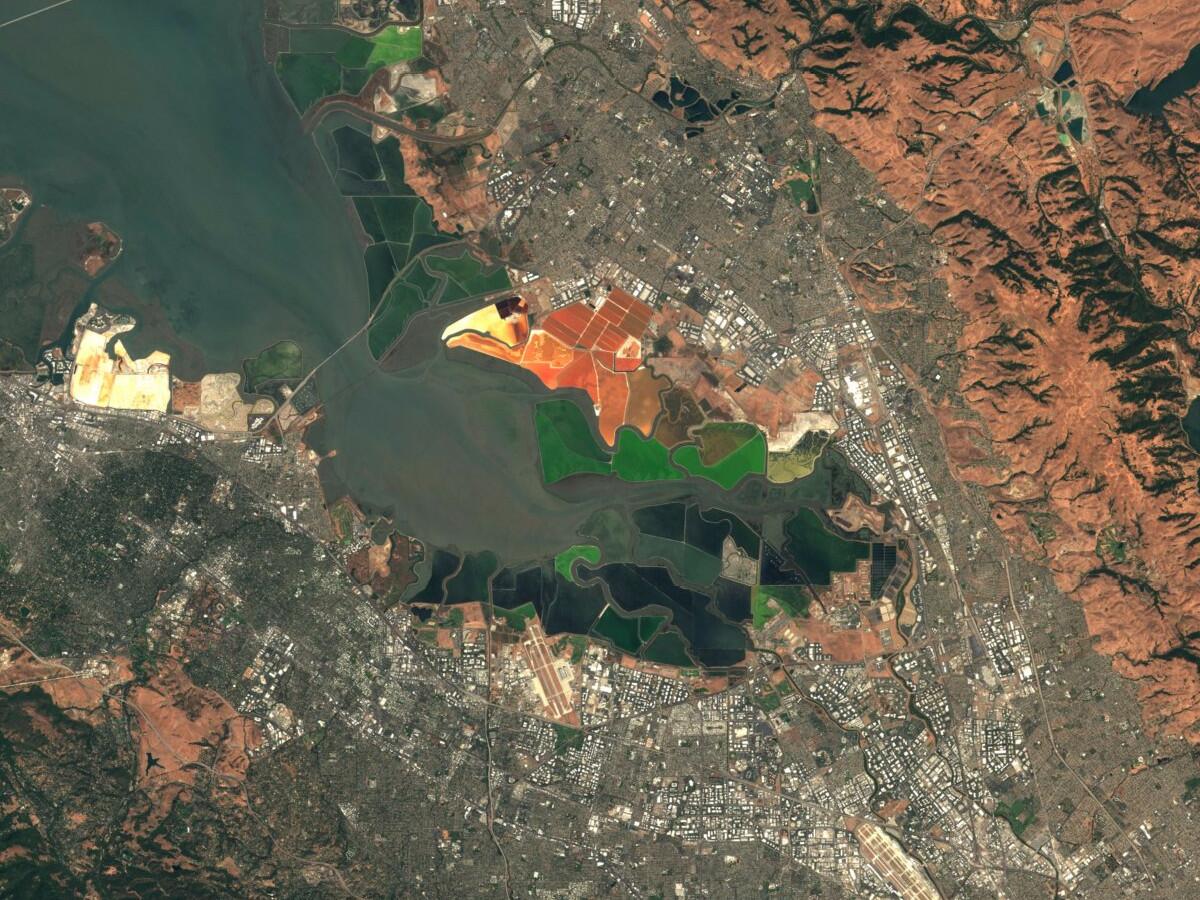
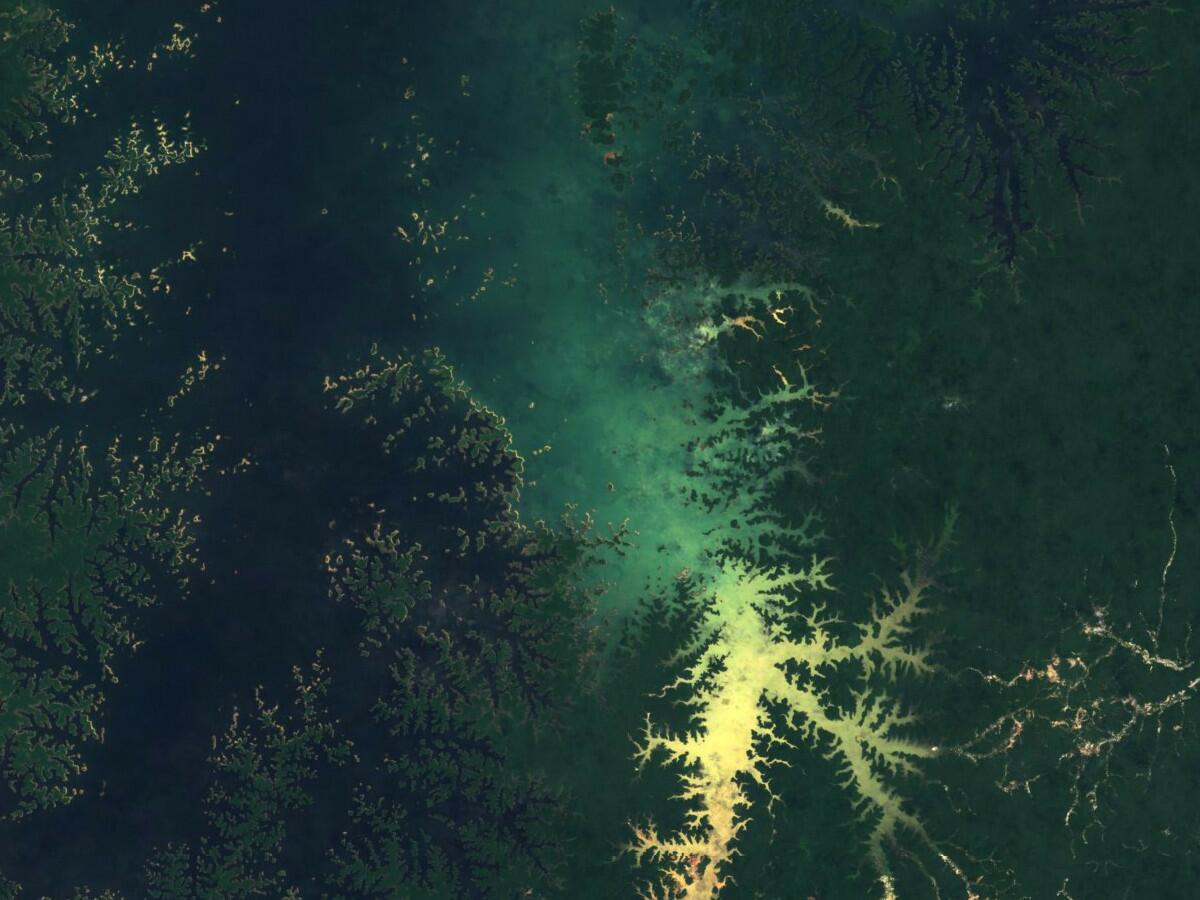
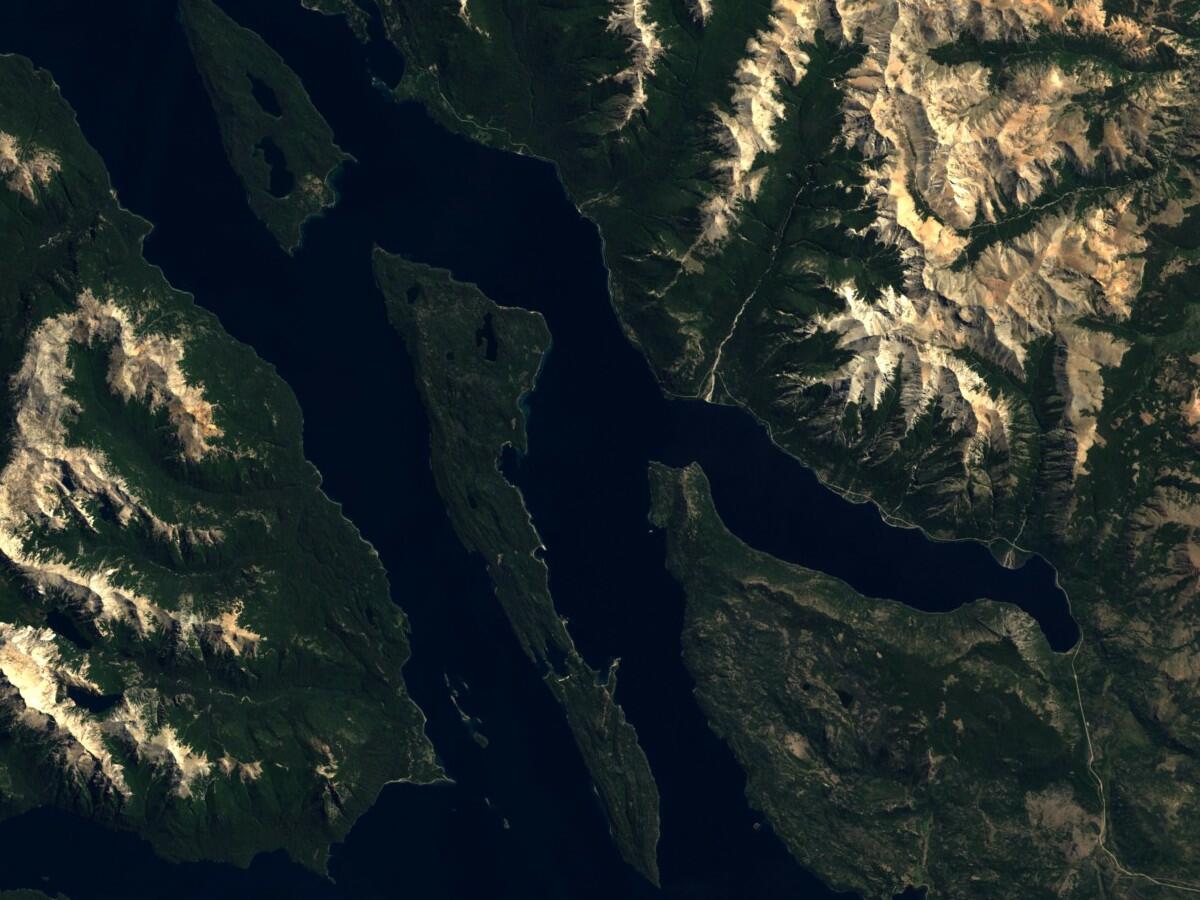
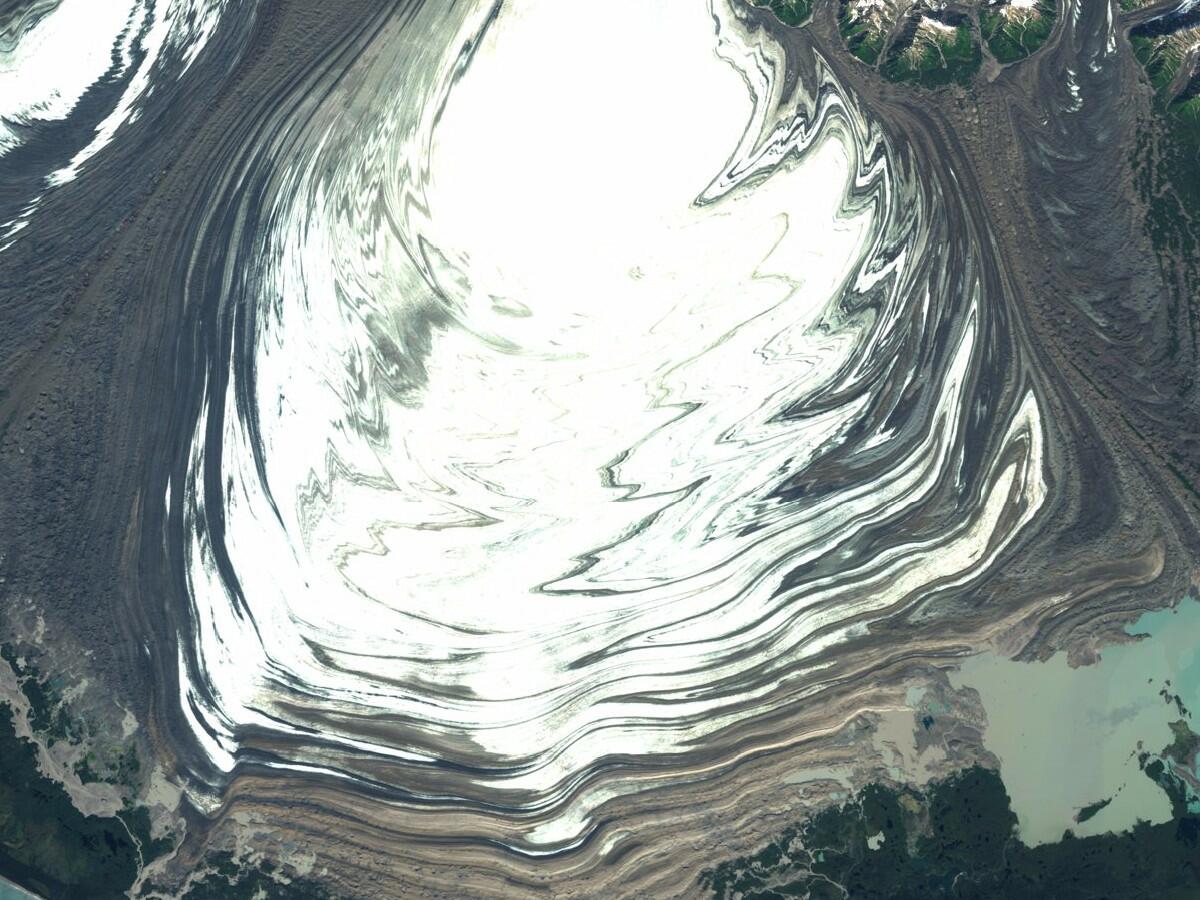
The first global, (almost) cloudfree mosaic of the world is released! Have a look at https://s2maps.eu (opens new window).
In March during the Sentinel-2B launch we released a cloudless mosaic covering Europe. The initial release helped us to identify weak spots and to overall assess our distributed processing approach using 20 VMs. After this first processing campaign we optimized and streamlined the process and underlying software. These optimizations enabled us to speed up the processing time by around 50%.
This layer now is integrated into EOX::Maps (opens new window) and can be used like the Terrain Layer or OSM.

# Method
The target was to create the first global cloudfree mosaic using the newly available Sentinel-2 data. The use case is to have a pure visual product to be used for mapping applications as a background layer. The data shall be from one year to find out whether it is feasible to provide an annual mosaic.
To get rid of the clouds, a combination of the provided cloud masks and a pixel selection algorithm which attempts to select a pixel without clouds or cloud shadows out of a time series is used. Because the selection happens pixel by pixel, it at least reduces significantly the spatial borders appearing between each Sentinel-2 scene.
To have a visually appealing mosaic, it is desired to show the Earth during Summer, when vegetation reaches its annual peak. This of course means having different time spans on the Northern and on the Southern hemisphere. Furthermore, the tropical regions require data from one whole year as they show a high degree of cloud coverage due to the innertropical convergence zone (opens new window), a zone where the trade winds from North and South meet and cause a relatively stable band of clouds around the globe.
Therefore, the time spans used differ over the globe. On the Northern hemisphere data from May 2016 until September 2016 is used, whereas on the Southern hemisphere data from November 2016 until March 2017 is used. The tropical regions contain data from May 2016 until April 2017.
For a more technical summary of the processing method, please have a look at the presentation slides (opens new window) from the last FOSS4G-Europe in Paris.

# Data
We already covered the topics of Sentinel-2 data structure and how to get the data in previous posts.
What will change in future though is a better temporal coverage due to the launch of Sentinel-2B in March 17. A better temporal coverage means a higher chance to extract a cloudfree pixel from the time stack which results in a better looking mosaic. Current plans over Asia and the Americas are not providing sufficient temporal coverage for a cloudless quality as can be obtained by our method over Europe and Africa. According to ESA's acquisition plans (opens new window), the revisiting time of one of the two Sentinel-2 satellites will be up to every five days at the equator (even more up to almost daily towards higher latitudes) but at least every ten days with a preference on Europe, Africa and Greenland.
The new global cloudfree tiles are also available via an AWS S3 bucket as described in a previous blog post.

# License
Sentinel-2 cloudless by EOX IT Services GmbH is now licensed under a Creative Commons Attribution 4.0 International License (opens new window). Note that we dropped the Share-Alike clause although we love to hear from you how you use the data.
Feel free to use the provided service endpoints (WMTS (opens new window) or WMS (opens new window)) directly in your application. You may also download the data either as rendered tiles from these services or as source GeoTIFFs from the AWS S3 bucket eox-s2maps in the eu-central-1 region. Please get in touch (opens new window) if you need anything else.
Whenever you use Sentinel-2 cloudless an attribution has to be provided. It shall read "Sentinel-2 cloudless - https://s2maps.eu (opens new window) by EOX IT Services GmbH (opens new window) (Contains modified Copernicus Sentinel data 2016 & 2017)" including the links as given here where possible.